EDA365欢迎您登录!
您需要 登录 才可以下载或查看,没有帐号?注册
x
设计师希望在 物联网 ( IoT)、工业物联网 (IIoT)、人工智能 (AI) 和机器学习 (ML) 应用的边缘收集更多数据时,就需要采用一种简单的方法来检测电压、电流、温度或压力等测量值,以确定其是否高于或低于阈值。类似地,也通常需要知道所测的量在数值范围之内或之外。存在噪声和干扰信号时很难在边缘进行这种判定,但是,如果能够正确选择并使用电压比较器会有助于改善这种局面。
: B. O. A( V1 y, e电压比较器是一种用于电压比较的电子器件,能够比较输入电压与已知参考电压并根据输入是高于还是低于参考值来更改其输出状态。该功能满足了检测阈值交叉、零位和信号幅值是否在幅值范围之内或之外的要求。 5 }( [; D, g/ y/ U
本文将介绍电压比较器的使用、特性及其关键的选型标准。本文以 Texas Instruments 的器件为例,讨论如何使用电压比较器检测阈值和过零,以及时钟恢复和张弛振荡器应用。 ! u4 K% `& {9 }7 d( a4 K
什么是电压比较器?3 U4 h; g. F5 p7 n3 H2 ]
电压比较器是一种输出逻辑状态的电子器件,用于指示两个输入中电压高的那个输入(图 1)。 * d n3 v6 q% x& U3 p7 R
3 }# q6 Q7 u5 i: b: x! G/ k8 h5 m4 n
所用比较器采用 Texas Instruments 的 TLV3201AQDCKRQ1 单比较器,该器件具有推挽输出。像所有比较器一样,该器件有两个输入。带负号 (-) 的反相输入和带正号 (+) 的同相输入。比较器输入非常类似于运算放大器输入。主要区别在于比较器输出是数字逻辑状态而非模拟电压。在图 1 中,输入是幅值为 200 毫伏 (mV) 的 1 兆赫兹 (MHz) 正弦波。当同相输入端的电压大于反相输入端的电压时,输出将处于高电平状态,此时为 2.5 伏。当同相输入端的电压低于反相输入端的电压时,输出将变为低电平状态,此时为 -2.5 伏。该比较器具有轨至轨输出,因此输出逻辑状态可扩展到电源电平。本例中,使用对称的 2.5 伏正负电源并且反映在输出电压摆幅中。
! w$ f: S- f7 c: b" {6 |0 i0 q一种考虑比较器的方法是,将其看作单位模数转换器 (ADC) 。如果配置为在过零时改变状态,则其输出本质上是符号位。 5 S9 V; E6 m/ [- _/ \0 [( ^
该比较器的响应时间为 40 纳秒 (ns),规定为传播速度或延迟。这是从输入端发生阈值交叉直到输出端改变状态为止的时间。传播速度会影响比较器的状态转换速度,而且实际中是带宽相关的规范。TLV3201 还具有 1.2 mV 内置电压迟滞,可用于抵消信号输入端的噪声。 ! P/ }# b8 M0 x
迟滞和噪声( }+ d2 G: M k. A& ], U0 e# K
如果比较器输入端存在噪声或杂散信号,则可能会发生多次阈值交叉且输出可能会随着阈值交叉进行多次转换(图 2)。
0 A4 q; O! E# R: F) @
6 x: o( A' z3 H* n2 Z解决这种有害的输出转换的方法是在比较器电路中增加幅值迟滞。迟滞会使比较器在其输出超过阈值后保持其状态,直到输入幅值的变化量固定为止。这是通过将正反馈从比较器的输出施加到比较器的输入端来实现的,该反馈可以小增量的形式实现阈值偏移(图 3)。
e" `, Y' F, f5 S+ J
8 m4 k; K1 t5 m! r6 F) q电阻 R3 将输出反馈到参考输入端,使得参考电平偏移由电阻器 R1、R2 和 R3 的阻值确定的一个较小的值。给定电阻值时,这将导致 400 mV 的迟滞,从而改变阈值,以使输出状态直到输入超过迟滞幅值才改变。这样的结果就是输出在阈值交叉处进行单转换。 + R' m C* R9 X/ x5 \) n: ?
关于用来与图 1 所示电路进行比较的电路的一些注意事项。首先,反相和同相输入已互换,导致输出逻辑反相。当信号低于阈值时,输出为逻辑高电平。该电路特征用在检测某个数值何时在数值范围内或范围外的电路中。TLV3201 采用 5 伏单电源供电,而不是图 1 所示的双 2.5 伏供电。因此,参考电压通过分压电阻 R1 和 R2 获得,具体为输入端的 2.5 伏共模电压。输入信号也被偏置到该共模电压。三角波的峰值电压为 2 伏,偏置电压为 2.5 伏。这种电路配置是一种常见的选择。 " X p6 p8 P4 ^" m) g" d
检测位于窗口内或窗口外的值
* W) }1 N1 n" G5 X单电压比较器可以检测输入电压是高于还是低于参考阈值。确定输入电压是否在两个极限之间时(称为开窗),需要使用两个比较器,每个极限值使用一个比较器(图 4)。 0 C4 [ ]( |3 {( \ Y/ X- ~: P
: a; q+ u1 n, |/ q8 N所示窗口电路采用了 Texas Instruments 的 TLV6710DDCR 双电压比较器。TLV6710 包含两个用于高电压应用的高精度比较器。供电电压可以在 1.8 至 36 伏之间。该器件包含一个 400 mV 内部 DC 参考源。如图所示,比较器输出采用开漏连接,可以通过一个公共上拉电阻将其输出连接在一起,进行逻辑“或”运算。比较器已接线,以便将参考电压施加到其中一个比较器(比较器 A)的反相输入端,非反向输入施加到另一个比较器(比较器 B)。通过由电阻 R1、R2 和 R3 组成的分压器施加输入电压,分压器将下限阈值电压设置为 3.3 伏,上限阈值电压设置为 4.1 伏。当输入 VMON 在窗口内时,比较器输出为高电平(3.3 伏)。比较器 A 指示输入电压低于 4.1 伏,比较器 B 指示输入电压超过 3.3 伏。TLV6710 的内部额定电压迟滞为 5.5 mV,有助于抑制噪声和小毛刺。 0 _6 x& U9 g2 w: ]
对于从高向低转换,该比较器的传播延迟通常为 9.9 微秒 (μs),从低到高转换时为 28.1 μs。这种差异是由于漏极开路输出的配置引起的。从高到低转换是通过输出 FET 实现的有源下拉,而从低到高转换则是通过电阻进行的无源上拉,这就需要更多时间。该比较器用于电压监测应用,无需极低的传播延迟。
/ t; a8 k% m+ b- C6 Q" b窗口应用( b+ T4 n! l0 T
窗口可用于机器人技术,通过光线和两个 CDS 光电管来控制机器人的移动方向。例如,硫化镉 (CDS) 光电池在灯光下会改变电阻,黑暗环境下电阻较高而灯光下则电阻较小。TINA-TI 仿真使用 Texas Instruments LM393BIPWR 双比较器说明了这一原理(图 5)。
/ H+ |5 C$ d6 x. G7 W, A6 h$ E' j$ a2 Q
/ y9 u4 s3 V7 X5 DLM393B 比较器是一款双比较器,具有集电极开路输出,可以在 3 - 36 伏的电源电压下运行。在该电路中,每个部分都向两台电机中规定为左或右驱动器的电机提供控制信号。 8 T& n, \" z+ e1 a% H7 z6 f& ?
电位计用于模拟两个 CDS 光电池。电位计设置为 0% 到 40% 表示右侧光电池受到光照,而左侧光电池则处于黑暗中。从 60% 到 100% 的设置表示光线主要照在左侧光电池上,而右侧光电池处于黑暗中。从 40% 到 60%的两个光电池都受到光照。当发送至任一电机的电机控制信号为 +5 伏时,电机正向旋转。如果电动机控制信号为 0 伏,则电机反向转动。
* v4 {) R" ]% T) @3 m( T当两个光电池均受到光照时,两个电机都向前运行,从而使机器人向前直线移动。当电位计在 0% 到 40% 之间时,左电机向前运行,右电机反向运行,从而将机器人向右驱动。在 60% 到 100% 的区域时,右电机向前转动,左电机反向,则机器人向左移动。
- i+ P) n; @: M7 A% Y比较器的参考电平来自分压器,右控制器的参考电压设为 2 伏(电位计的 40%),左控制器的参考电压设为 3 伏(电位计的 60%)。 9 r3 X% w% }- N& C2 w, x/ g5 e- |
弛张振荡器
( G2 k& |, H2 K2 F通过使用正负反馈,可以将比较器配置为弛张振荡器(图 6)。
" U1 I5 b0 v% N! E2 V$ Q0 H. T" B' I! v4 g
可以使用图 6 所示的电路创建具有方波输出的齿张振荡器(也称为不稳定多谐振荡器)。振荡频率由 R1 和 C1 的电阻电容时间常数确定。当 C1 最初放电(0 伏)时,反相输入电压低于同相输入端的参考电压。输出被强制为 5 伏。电容器 C1 通过 R1 充电至参考电压,此时输出降至 0 伏。C1 通过 R1 放电直到其降至参考电压以下,然后重复该循环。参考电压已添加了迟滞(正)反馈。当输出为 0 伏时,参考电压为 2.5 伏。当输出为 5 伏时,参考电压将增加约 1.7 伏,从而使其达到 4.2 伏。如图所示,瞬态响应显示了输出 (Vo) 和电容器 (Vc) 的电压波形。
$ l- Z" Q6 R9 J7 A* K3 [5 J/ r最大振荡频率受比较器传播延迟的限制。本例中,采用具有 40 ns 传播延迟的 Texas Instruments TLV3201 用于构建 10 MHz 振荡器。该频率非常接近该比较器的最大值。 & e8 E- u5 O& a% Q
时钟的恢复与还原
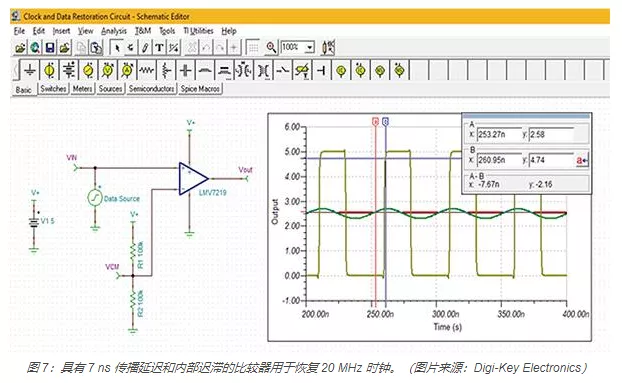
# ?7 p; S! f6 }( l) Z7 u通过背板和电缆传输的时钟信号会因带宽限制、码间干扰 (ISI)、噪声、反射和串扰导致性能下降。比较器可用于恢复时钟信号并将其恢复为更清晰定义的形式(图 7)。
2 \2 A3 R& t: {3 R: n
4 k+ [& [# j3 v/ l在这类型应用中,传播延迟更为关键。比较器可以跟踪的最大频率是传播延迟和输出转换时间的函数:
6 H) z* X6 b, K- M![]() 6 @- e: v. `1 w. q3 \9 T) [1 ?
其中:fMAX 是最大触发频率- b0 m, L, Z/ |# |
tRise 是输出上升时间
; j4 o6 a9 N0 G* c' QtFall 是输出下降时间
! f7 O# h% o$ P1 G S' WtPD LH 是从低到高的传播延迟
x: ^1 s! j8 p1 wtPD HL 是从高到低的传播延迟
! a. {- b4 |4 \( s4 {7 NTexas Instruments LMV7219M5X-NOPB 使用 5 伏工作电源,上升时间为 1.3 ns,下降时间为 1.25 ns,两个转换方向的典型传播延迟为 7 ns。这样产生的最大触发频率为 60.4 MHz。即使采用 2.7 伏电源、更长的传播延迟和转换时间,该比较器速率的最大跳变约为 35 MHz,也足以满足该 20 MHz 时钟的需求。 + z# j/ }. J: k6 G
除了极低的传播延迟外,LMV7219 还集成了一个轨至轨推挽输出级,这意味着较短且均匀的上升和下降时间。该器件还具有 7.5 mV 内部迟滞,能最大程度地减少噪声影响。
# L1 p1 K3 O, I结论
: W, y( Q4 L; `' P9 q3 K比较器是连通模拟和数字世界的桥梁,无论用于边缘 IIoT、AI 或 ML 信号电平和窗口化,还是用于零检测、时钟恢复,再或者用作振荡器,电压比较器都将是一种特别有用的工具。
) m8 I8 B: E$ Z; y5 R$ N- V/ s | 


 /1
/1 






 发表于 2021-2-19 11:15
发表于 2021-2-19 11:15



 收藏
收藏 淘帖
淘帖 支持!
支持! 反对!
反对!